Available models
Arm2DEnv
Simple 2D arm environment with 2 degrees of freedom and 6 muscles. The objective is to grab a ball randomly appearing in the space every 3 seconds.
| # of muscles | 6 |
| # degrees of freedom | 2 |
| reward | negative distance from the requested point |

Toy model
Note that Arm2DEnv model is simplified and not physiologically accurate. We suggest using it only for testing purposes.
L2RunEnv
NIPS 2017 challenge model, where you are asked to build a controller to make a musculoskeletal model run as quickly as possible. Read more in the documents on the NIPS 2017 challenge.
| # of muscles | 18 |
| # degrees of freedom | 9 |
| reward | distance travelled in a simulation step |
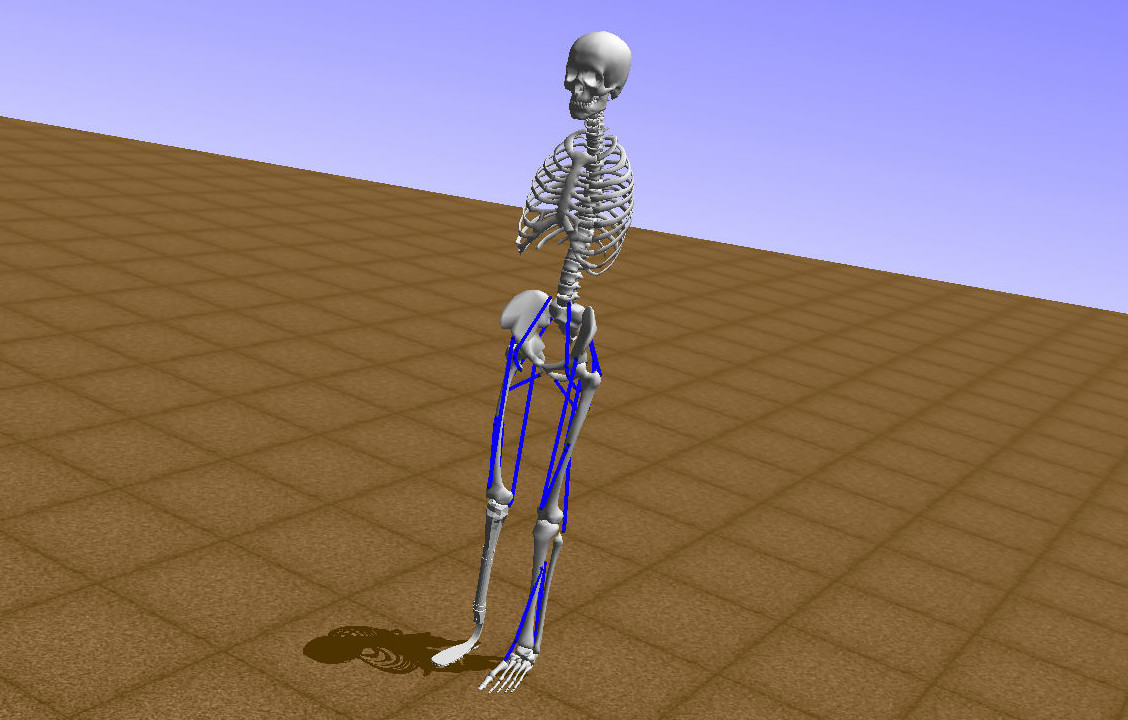
ProstheticsEnv
NIPS 2018 challenge model, where you are asked to build a controller to make a musculoskeletal model with a prosthetic leg follow desired velocity vector changing in time. Read more in the documents on the NIPS 2018 challenge.
| # of muscles | 19 |
| # degrees of freedom | 14 |
| reward | negative distance from requested velocity |